
Il complesso architettonico delle Piramidi di Giza rappresenta da secoli uno dei più grandi misteri dell'umanità: ogni anno scienziati, ricercatori, studiosi e appassionati di archeologia restano inevitabilmente affascinati da questo simbolo universale del genio e della creatività umana e hanno tentato di rivelarne gli aspetti più reconditi; ma nessuno sino ad ora si era spinto così oltre. Il progetto ScanPyramids vuole porre fine al mistero della Grande Piramide di Giza, e lo sta facendo con le tecnologie più avanzate.
Lanciata ad ottobre 2015, la missione ScanPyramids ha esaminato la Piramide di Cheope con tecnologie non-invasive, come la Termografia ad Infrarosso, la Muografia (Tecnica di imaging che produce un'immagine proiettata di un area specifica, segnalata da particelle elementari dette muoni) e la simulazione 3D. Questo approccio multidisciplinare ha consentito di individuare una nuova cavità all'interno della Piramide di Cheope, di cui abbiamo brevemente parlato in una recente notizia.
Ad ottobre 2016, un team internazionale di esperti individua la presenza di una grande vuoto al di sopra la Grande Galleria (SP-BV: ScanPyramids - Big Void). All'interno della piramide vengono allestiti pannelli con pellicole emulsive per i muoni, impiegati per osservare la cavità da diversi punti di vista. Presso il corridoio ascensionale, sito vicino al tunnel scavato da al-Mamun, viene individuato un'altro vuoto (SP-NFC: ScanPyramdis - North Face Corridor). I dati ottenuti da entrambe le indagini lasciano ipotizzare che la cavità inferiore (SP-NFC) potrebbe essere un corridoio, simile a quello già presente all'interno della Grande Piramide, che conduce al grande vuoto individuato al di sopra della grande galleria (SP-BV; vedi immagine sottostante).
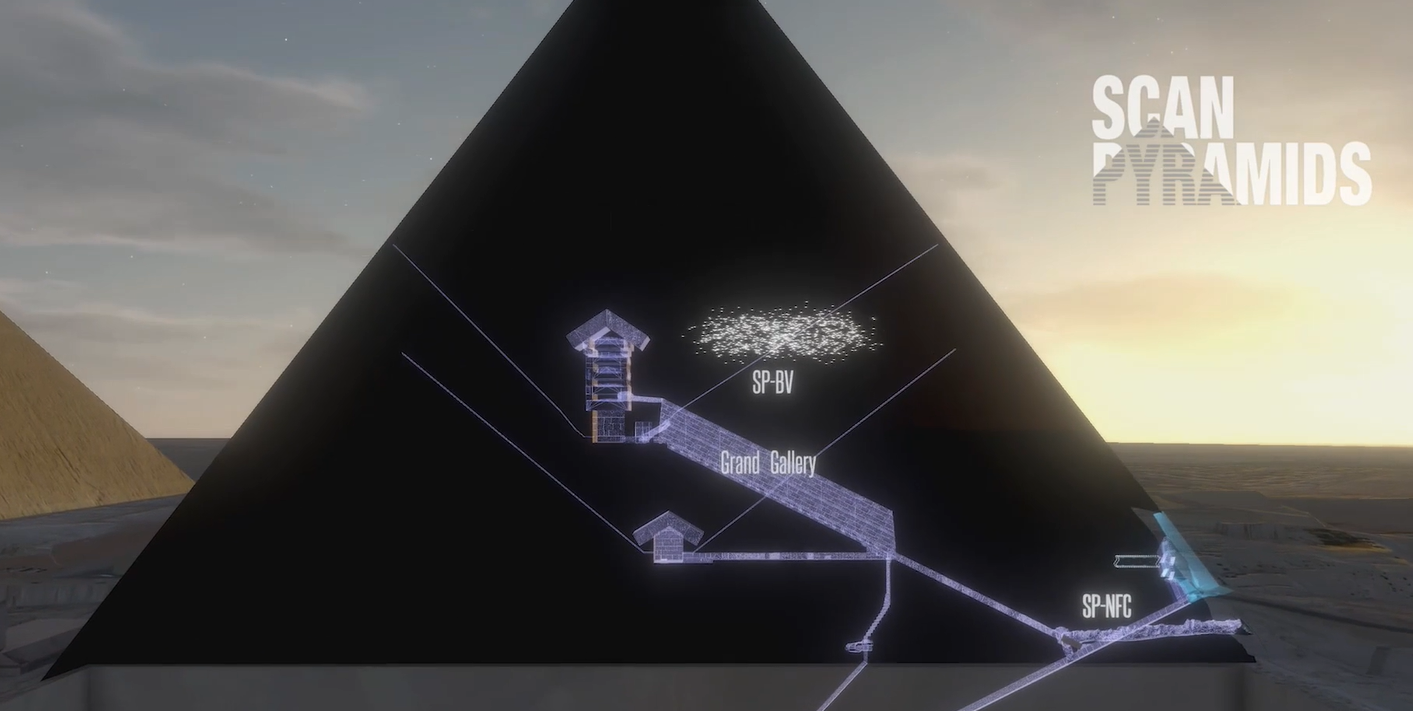 Immagine della Grande Piramide, sono visibili entrambe le cavità individuate (Crediti: Project ScanPyramids).
Immagine della Grande Piramide, sono visibili entrambe le cavità individuate (Crediti: Project ScanPyramids).
Tre diversi team hanno lavorato indipendentemente alle indagini, realizzandole sia dall'interno che dall'esterno della piramide (anche attraverso un telescopio che impiega la tecnica di imaging dei muoni), e tutti hanno prodotto gli stessi risultati: all'interno della piramide si trovano grandi cavità ancora inesplorate.
L'accesso a queste cavità è però impossibile per un essere umano, senza che questi intacchi l'integrità della struttura. Quindi, se i misteri della Grande Piramide saranno risolti, potremmo dover ringraziare piccoli robot, in corso di elaborazione dagli scienziati che lavorano al progetto ScanPyramids. E gli archeologi potrebbero cominciare ad indagare le camere nascoste delle piramidi realizzando piccoli fori di 3-4 cm circa, nei quali dovrebbero passare microdroni, che concettualmente si ispirano alle api.
 Rendering del robot elaborato da INRIA (Crediti: INRIA).
Rendering del robot elaborato da INRIA (Crediti: INRIA).
Questa tecnologia potrebbe presto diventare una realtà, grazie al lavoro degli istituti di ricerca Inria e del Centre national de la recherche scientifique (CNRS).
“The main challenge is to insert a complete exploration robot in a hole that is as small as possible,” ha detto Jean-Baptiste Mouret a digital Trends . “It is important to use a hole as small as possible because we want to leave as few traces as we can. This what we call ‘minimally invasive robotics.’ We chose a diameter of 1.5 inches because it is a good trade-off between the size of the hole, the kind of machines that can bore holes, and the current robotics technologies.”
 Schema di funzionamento del robot (Crediti: ScanPyramids).
Schema di funzionamento del robot (Crediti: ScanPyramids).
Dopo aver esplorato lo spazio nascosto e aver inviato i dati, il drone si chiude ed esce dalla camera: l'idea è di non lasciare alcuna tecnologia moderna all'interno di un sito antico. Oltre ad essere in grado di passare attraverso piccoli spazi, gonfiarsi e sgonfiarsi all'occorrenza, il robot è più versatile di un modello con le ruote: può esaminare uno spazio da più punti di osservazione e fornire informazioni più complete ed è meno probabile che danneggi antichi artefatti andandoci a sbattere contro. Sarà equipaggiato con luci, una telecamera ad alta definizione e altri dispositivi di raccolta dati. Ed è telecomandato via radio ma avrà un sistema di backup automatico.
 Rendering del secondo minirobot esploratore con telecamera apribile (Crediti: INRIA).
Rendering del secondo minirobot esploratore con telecamera apribile (Crediti: INRIA).
Lo sviluppo di questi piccoli robot è in fase di elaborazione, ma non è prevista una data di completamento. Costruire un robot di questo tipo è una sfida considerevole, che coinvolge anche la stampa 3D. Se la costruzione di questi mini robot andasse buon fine, il loro uso potrebbe coinvolgere tantissimi ambiti dell'archeologia.
Per maggiori informazioni sul funzionamento dei robot è possibile leggere l'intervista di IEEE Spectrum a Jean-Baptiste Mouret, ricercatore ad INRIA.